廃炉の現実に向き合い生まれた「紫峰」。シンプルで速く、確実に動くロボット製作に至るまで
SHARE
- 公開日
- 取材日
2025年12月20日に開催された「第10回廃炉創造ロボコン」。福島第一原子力発電所の廃炉作業を想定し、原子炉格納容器(PCV)内部にアクセスして対象物を回収するロボットを高専生が製作する大会です。
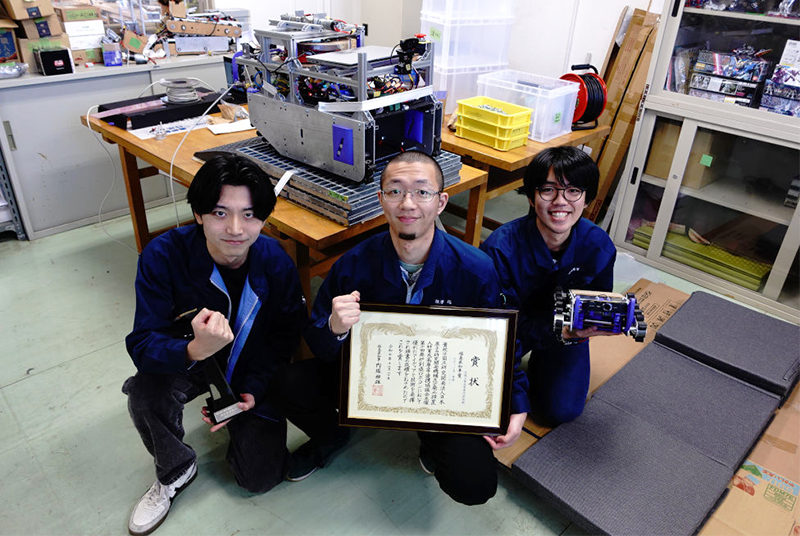
今回、茨城高専の「Hirasawa Lab.」は福島県知事賞(優秀賞)を受賞しました。同チームは、親機の内部から子機が展開する構造のロボット「紫峰(しほう)」を製作しました。競技ではスタート直後から安定したスピードで進行。親機から子機を送り出し、驚異的な速さで3つの堆積物の回収に成功しましたが、帰還時には入口付近の段差に苦戦し時間切れに。それでもロボットの動きの完成度や前半のスピードが高く評価され、受賞に至りました。
今回はチームリーダーで回路制御を担当した根津佑(ねつたすく)さん、操縦者・制御・UIを担当した関口佳汰(せきぐちけいた)さん、安全管理・設計を担当した添野大智(そえのたいち)さん(いずれも機械・制御系制御コース5年生)に、開発の裏側を伺いました。
実際の社会課題に向き合える点が魅力
―廃炉創造ロボコン(以降、廃炉ロボコン)に参加したきっかけを教えてください。

根津さん:もともと4年次まで茨城高専ロボット部に所属し高専ロボコンに出場していて、その頃に部の先輩から廃炉ロボコンの話を聞いたのがきっかけでした。廃炉ロボコンは実際の社会課題をベースにしたテーマで競う大会です。そういった現実の問題に向き合うロボット開発に挑戦してみたいと思い、参加を決めました。
―高専ロボコンとはどのような違いを感じましたか。
根津さん:高専ロボコンはエンターテインメント性が強く、現実には存在しないような課題をどう解決するかという面白さがありました。一方で廃炉ロボコンは、実際の廃炉作業を想定した課題に取り組みます。
また、高専ロボコンは点数を競う「勝負」の要素が強いですが、廃炉ロボコンはチーム同士の駆け引きというよりも、いかに確実・正確にロボットを動かすかが重視されます。安定して性能を発揮することが求められる点が、大きな違いだと感じました。
―関口さんはどのようなきっかけで参加されたのでしょうか。
関口さん:もともとWebアプリケーションやAI関連の開発をしていて、いつかロボットのように現実世界で動くものの開発にも関わってみたいと思っていました。そんなときに根津に声をかけてもらって、制御担当としてチームに加わりました。
実は、東日本大震災のときに福島に住んでいたこともあり、廃炉ロボコンの話を聞いたとき、「自分の得意分野で復興に関われるかもしれない」と感じて、参加してみたいと思いました。
―添野さんは、もともとロボコンに興味があったそうですね。
添野さん:はい。昔からロボコンをテレビで見ていて、いつか自分も参加してみたいと思っていました。それで、平澤先生の研究室が廃炉ロボコンに参加していると知り、根津にアピールしていました(笑)。実際、根津から声をかけてもらったときは素直にうれしかったですね。
それまでロボット製作に関わった経験はなかったので、「自分で大丈夫かな」という不安もありました。でも心配よりもワクワクする気持ちのほうが大きかったです。
―根津さんは、なぜ2人に声をかけたのでしょう。
根津さん:4年生のときに、授業でライントレースカーを作る課題が出ました。そのとき、関口と添野の2人は同じチームで取り組んでいて、機体の完成度がとても高かったんです。制御プログラムもしっかり動いていて、「ぜひ一緒に開発してみたい」と思いました。
もともと仲も良かったですし、ロボット開発はチームワークが大事なので、このメンバーならうまくいきそうだと感じて声をかけました。チームが結成されたのが2025年4月の中頃。そこから大会までおよそ8か月、ロボットの製作を3人で進めていきました。
現場で確実に動く「信頼性の高いロボット」を追求
―今回の課題に取り組むにあたり、ロボット製作で工夫した点を教えてください。
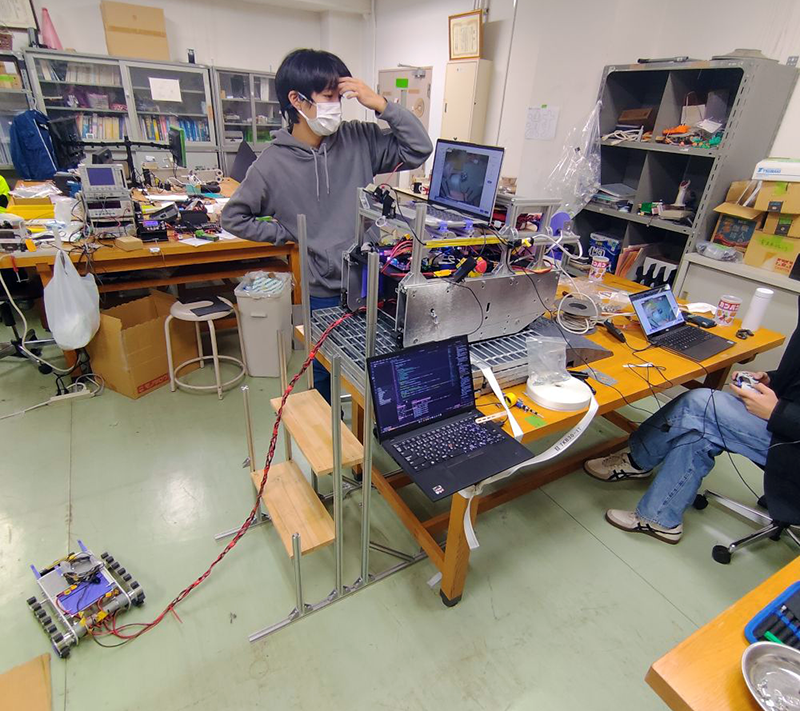
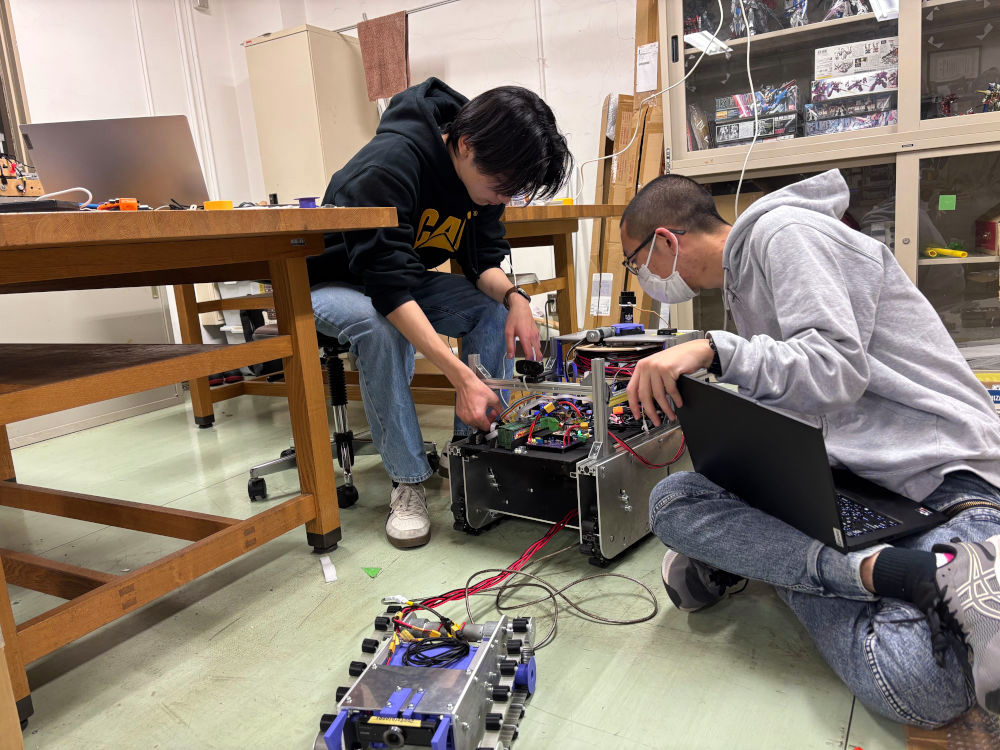
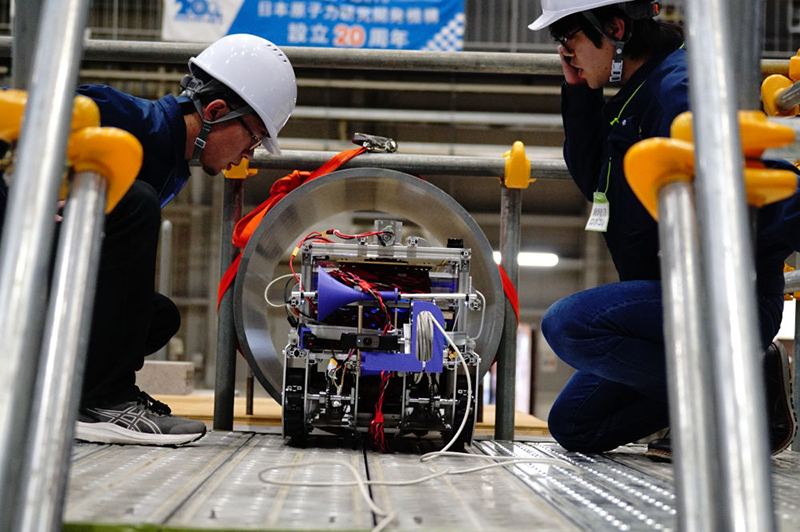
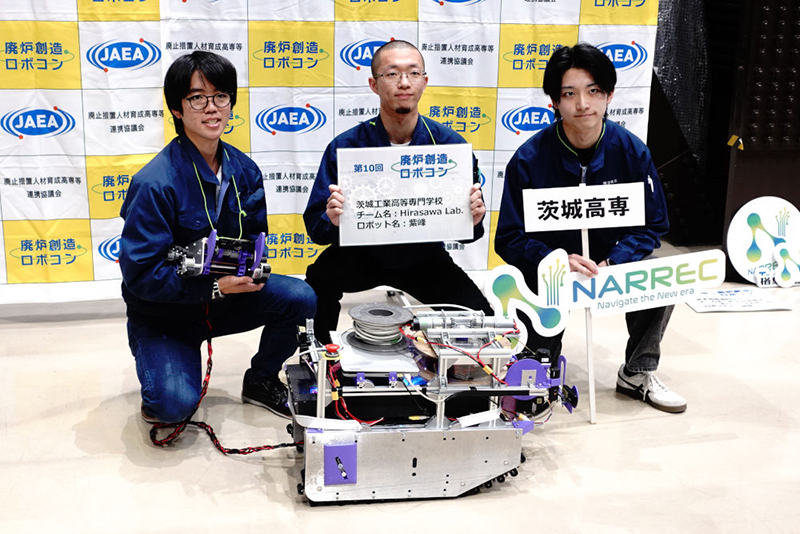
根津さん:ロボット「紫峰(しほう)」の大きな特徴は、「親機」と「子機」に分けた構造です。子機には制御回路を搭載せず、親機からケーブルで接続して動かす設計にしています。もともとは、昨年大会に出場した研究室の先輩たちが親機と子機に分けた構造にしていて、そのアイデアを使えないかというところから始まりました。
ただ、夏に原発関連施設を見学した際に、放射線環境についての話を聞き、現場を想定するなら設計も見直すべきだと考えるようになりました。放射線の強い場所では電子回路が故障する可能性があります。そこで、堆積物の近くまで入っていくために、実際の現場では高線量下に晒されるであろう子機には、できるだけ故障の原因になる電子部品を載せない構造に改良しました。
―操作のしやすさにも工夫があったそうですね。
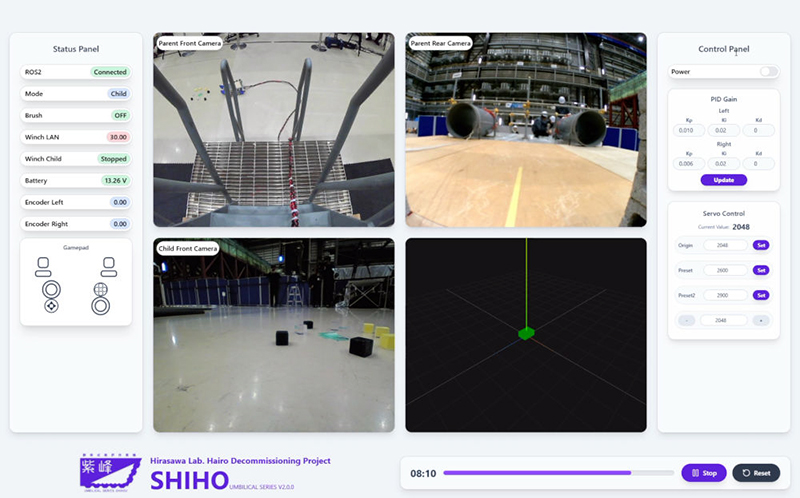
関口さん:今回のシステム開発では、「誰でも扱えること」を大きな目標にしており、操縦にはゲーム用コントローラを使いました。
ロボットや重機は専用のコントローラを使うことが多く、操作を覚えるのに時間がかかるという課題を感じていました。もともと僕がゲーム好きということもありますが、若い世代にとって馴染みのあるゲームコントローラなら、直感的に操作できるのではないかと考えたんです。
操作画面もWebアプリケーションで作り、情報表示と操作パネルを1つの画面にまとめています。特別な操作を覚えなくても、簡単な説明だけで動かせるようなインターフェースを目指しました。
―添野さんは設計面を担当されています。どのような点を意識しましたか。
添野さん:去年、先輩たちは時間切れという結果で、その原因を自分なりに考えてみたんです。そうして、デブリの回収に時間がかかったのが1つの原因ではないかという考えに至りました。
そこで、デブリの回収機構はできるだけシンプルにし、ボタン1つでモーターが動く仕組みにしています。操縦者の負担を減らし、作業がスムーズに進むよう意識しました。
また、子機はできるだけ小型・軽量にすることにこだわっています。今回の競技では、親機から子機を階段で降ろし、デブリを回収した子機を親機が再び引き上げる必要があります。子機が重いとそれが難しくなるので、必要な機能を残しつつ、どこまで削ぎ落として小さくできるかを考えながら設計しました。
―優秀賞(福島県知事賞)の受賞につながったポイントはどこにあったと思いますか。
根津さん:機能を詰め込みすぎず、シンプルにしたことだと思います。他のチームのロボットはとても魅力的な機能が備わっていましたが、現場ではまず確実に動くことが重要です。故障やトラブルが起きにくい構造を意識した点が評価されたのではと感じています。
関口さん:動きのスピードも大きかったと思いますね。
添野さん:はい。デブリを回収して子機が階段を上り、親機に戻るまでを約3分で終えられので、その点も評価されたのかなと思います。機動性と作業の速さは意識して設計した部分でした。
関口さん:あとは、実は十分な練習時間があったわけではないのですが、それでもスムーズに操縦できたのは、機体や回路、制御システムがうまく噛み合っていたからだと思います。
―大会前日のテストランでは、操縦用のコントローラが壊れるハプニングもあったそうですね。
関口さん:はい……(笑)。僕が普段使っているゲームコントローラを持っていったのですが、リュックに入れるときに雑に扱ってしまって、テストランのときに動かなくなってしまったんです。「自分のせいでロボットが動かなくなった」とかなり落ち込みました。
そのあと往復2時間くらいかけて新しいコントローラを買いに行き、事なきを得ましたが、ヒヤッとした瞬間でしたね。ですが、このような急なトラブルにも、汎用ゲームコントローラを使用していたおかげで、プログラムの変更等なくスムーズに対処できたとも感じています。
―本番の競技を終えたときの気持ちはいかがでしたか。
根津さん:まずはほっとしました。テストランではうまくいかないことも多く、「まだ問題があるんじゃないか」と不安もありましたが、本番では一番いいパフォーマンスができました。僕が担当した回路は操縦者の入力をロボットに伝える重要な部分なので、問題なく動いてくれて安心しました。
関口さん:安堵と興奮が混ざった感覚でした。これまで成功したことがなかったので、ロボットがデブリを回収して戻ってきた瞬間は本当にうれしかったです。操縦中は手が震えるほど緊張していましたが、自分たちが作ってきたものが動いたという達成感が大きく、同時にこのチームで良かったとも思いました。
添野さん:僕は比較的落ち着いて見ていたかもしれません。テストランの時点でやれることはやったという感覚があったからです。ただ、うまくいかなかった場合にデモンストレーションへ切り替える判断は僕の役割でした。それは終了の合図でもあります。その点は少し心配でしたが、結果的に最後までうまくいって安心しました。
―優秀賞(福島県知事賞)を受賞して、率直なお気持ちはいかがでしたか。
根津さん:テストランでは苦戦しましたが、本番で一番いいパフォーマンスを出せた感覚がありました。そこを評価していただけたのかなと思い、うれしかったです。ここまで一緒に作ってくれたメンバーへの感謝が大きいです。
関口さん:最優秀賞に届かなかった悔しさはあります。でも、さまざまなロボットがある中で、僕たちが目指していた「信頼性の高いロボット」というコンセプトが伝わり、結果につながって良かったと思います。
添野さん:「紫峰」は放射線環境を意識した構造や、操縦者の負担を減らす設計など、内側の工夫が強みでした。ただ競技中は、そういう部分は伝わりづらいとも感じていて……。だからこそ、評価されて結果が出たときは安心しました。
1つの課題に対して、たくさんの異なる答えがある面白さ
―今回の経験を通して、得られた学びはありましたか。
根津さん:少人数でのチーム開発の進め方は、かなり鍛えられました。3人だと密に会話しながら作れる分、話のまとめ方や意思決定のスピードが重要になる。そこは大きな学びでした。
関口さん:役割分担がある中で、計画性の大切さを実感しました。あと、アイデア出しでは「馬鹿げた案」を否定しないことも大事だなと。結果的に、そういう発想が突破口になることもあります。逆に、自分もどんな案でも素直に言ってみることの重要性も感じました。
添野さん:チーム開発のあれこれは2人と同じ意見で、加えて僕は忍耐力です。朝から夜遅くまで作業する日もあって、正直ハードでした。でも、来年度から社会人になるので、この経験はいい準備になったと思います。
―廃炉というテーマに向き合ったことで、考えが変わった部分はありますか。
根津さん:最初は正直、廃炉作業とロボット開発がそこまで結びついていなかったんです。でも取り組む中で、ロボットが「どんな場面で、どう役立つのか」を、開発者の視点で具体的に考えるようになりました。放射線の知識と機体設計が直結することも実感しましたし、現場に持ち込むときに「どういう構造なら扱いやすいか、壊れにくいか」といった視点で、廃炉作業そのものを捉え直すようになりました。
関口さん:夏に福島第一原子力発電所を見学する機会がありました。原子力発電には怖いイメージを持つ人もいると思いますが、僕はそれ以上にその巨大な発電装置に圧倒されました。現地で話を聞き、原子力に関する知識を得て、事故のあと、これから何十年もかけて後始末をしていく現実も知りました。技術をどう受け止め、どう向き合うべきか。自分の中で考えるきっかけになったと思います。
添野さん:廃炉について深く知ることができたのは大きかったです。ロボット開発は、どうしても「作ること」そのものに目が行きがちですが、今回は自分たちのロボットやアイデアが、社会に役立つ可能性があると感じられました。そういう意味で、ロボットを作り続けることにもちゃんと意味があるんだなと思えました。
―今後の目標について教えてください。
根津さん:僕は大学に3年次編入が決まっています。ロボット開発を続けながら、社会課題の解決に貢献できる人材になりたいです。特に興味があるのは、「作る」だけではなく、「壊す」「後始末をする」領域です。廃炉のように、過去の産業的な遺産をどう整理していくかに関わるロボットを研究していきたいです。
関口さん:大学のロボティクス関連学科に3年次編入し、新たなロボット開発に取り組む予定です。自動運転など、これからの生活を支える技術にもつながる分野だと思っています。ロボットは複数の技術の組み合わせでできているので、自分の得意分野を組み合わせながら、より先進的なロボットを作れるようになりたいです。
添野さん:僕は就職が決まっていますが、ロボット製作の楽しさを知れたので、趣味として続けていきたいです。3Dプリンタや外部サービスを使えば、個人でも試作しながら作れる環境は整っているのだと、今回実際に製作してみてわかりました。いつか一人で一台作ってみたいですね。
―最後に、廃炉ロボコンに参加を検討している高専生へメッセージをお願いします。

根津さん:廃炉ロボコンの面白さは、同じ課題に対して、チームごとにまったく異なるアプローチのロボットが生まれるところです。その背景には、廃炉作業という現実の課題に向き合う意識があるからだと感じます。チームで1つの課題に向き合ってロボットを作るプロセスも、他の参加者と交流できるのも面白さです。ロボット作りに関わる人たちと出会い、技術を高められる環境に身を置きたい人には、ぜひ参加してほしいです。
関口さん:実際の廃炉作業という社会課題に向けてロボット開発ができる点が、この大会の魅力です。現場を想定すると制約が多く、その中でどう実現するかを考えるからこそ、これまで身につけたスキルを最大限発揮できます。僕自身、この大会を通じてロボットの研究分野に進もうと決意できました。次の世代にもぜひ参加してほしいです。
添野さん:ロボコン未経験の高専生にこそ参加してみてほしい大会です。大変なことも多いですが、他校の人たちと技術の話をしたり、アイデアの背景を聞けたりするのも、この大会の面白さです。僕自身、参加して「ロボット製作を続けたい」と思うようになりました。参加するだけで将来が変わることもあると思います。機会があれば、ぜひ飛び込んでみてください。
◇
【関連記事】
チーム「Hirasawa Lab.」の指導教員・平澤順治先生の記事はこちら
SHARE
茨城工業高等専門学校の記事



アクセス数ランキング

- STEM教育導入で英語×ものづくりのハイブリッド学習。国際高専1期生の活躍に迫る!
- 金沢工業大学大学院 工学研究科 機械工学専攻 博士前期課程 1年
青木 心路 氏

- 新人でも任される環境で、気づけば仕事にのめり込んでいた。高専からゼネコン現場の最前線へ
- 日本国土開発株式会社 土木事業本部 技術部 技術支援グループ
吉田 和也 氏


- 「学ぶって、本当は楽しい」──AI研究と教材開発で描く“気づきの種”のつくり方
- 神戸市立工業高等専門学校 システム情報工学科 教授
藤本 健司 氏
-300x300.jpg)
- 高専OG初の校長! 15年掛かって戻ることができた、第一線の道でやり遂げたいこと
- 鹿児島工業高等専門学校 校長
上田 悦子 氏


- 全国の高専をまとめた仮想研究所?「GEAR5.0」プロジェクト
- 鈴鹿工業高等専門学校 材料工学科 教授
兼松 秀行 氏

- 高専から通信インフラの現場へ。NTT-MEで働く小山高専出身・同期3名の現在地
- 株式会社エヌ・ティ・ティ エムイー 関信越ブロック統括本部 栃木エリア統括部 サービスセンタ
西田 和樹 氏
株式会社エヌ・ティ・ティ エムイー 関信越ブロック統括本部 栃木エリア統括部 サービスセンタ
森山 晃多 氏
株式会社エヌ・ティ・ティ エムイー 関信越ブロック統括本部 栃木エリア統括部 サービスセンタ
山村 琉空 氏
- 昨日まで世界になかった反応で、明日の未来を変える分子をつくる! 心に残り続けた、下村脩先生の言葉
- 福島工業高等専門学校 化学・バイオ工学科 助教
森 崇理 氏

- すべてのことには意味がある。人生は「瞬時値」ではない。
- 小山工業高等専門学校 電気電子創造工学科 教授、校長補佐(専攻科長)
高専機構本部 教育参事併任(令和4年3月末まで)
鈴木 真ノ介 氏
一関高専体育館-2-1-300x300.png)