幹部自衛官から大学研究者へ転身、そしてベンチャー創業。全ての経験を、目の前にいる高専生の学びにつなげたい
SHARE
- 公開日
- 取材日
防衛大をご卒業後、自衛官として航空機整備やエンジン整備に携わっていたという東京高専の原口大輔先生。その後、自衛隊から大学院へ移り、宇宙工学や手術ロボットの研究を続けてこられました。高専の教員になるまでにどんな出来事や心の変化があったのか、お話を伺いました。
自衛隊で鍛われた精神力と人間力
―防衛大から自衛隊、その後は大学院へと珍しい経歴ですね。

ええ。昔から自衛官を目指していたわけではないんですが、受験を迎える頃に勧誘を受けて防衛大の見学へ行ったんです。勉強も部活もしっかり力を入れてできるのでそこに惹かれました。卒業後は航空自衛隊に入り、航空機を整備する部隊に配属されました。
戦闘機は夜間飛行の訓練もありますから、整備に関わる私たちの仕事も夜遅くまでかかることがあります。飛行機に何か不具合があればパイロットから報告を受けて、翌朝までに飛べる状態にしなくてはいけません。
不具合の原因を分析して修理し、その内容をパイロットに詳しくプレゼンすることも整備部隊の役目です。命がかかっているので、不具合のあった飛行機に乗ってもらうためには、よほど説得力ある内容が必要になります。
当時の私は22~23歳の新人です。説明がおぼつかないと「そんな飛行機には乗れない!」と納得してもらえないケースもあるんです。もちろん、実際には新人一人に任せることはなく熟練の技術者がきちんと見ているので、命に関わるトラブルにつながるはずはないんですが。そういった厳しい指摘は若手幹部を鍛える意味もあったのだと思います。
―その後はどんなお仕事を?

整備部隊で1~2年ほど働いた後、次はエンジン整備の小隊に配属されました。そこで小隊長になったんです。部下は総勢65人、中には50代の部下もいました。ここでまた別の洗礼を受けましたね(笑)。
年齢は若くても「小隊長」ですから、たとえ熟練の軍曹であっても動かさなくてはいけません。先輩に相談したり、個人面談で話を聞いてもらったりして、だんだんと人を動かす力を身に付けていきました。私の場合は一番年長者の自衛官がサポートに付いてくださったので、その方に指示をしてもらうことでスムーズに進むことが多かったですね。
そこで2年弱働いた後、自衛隊を離れるまで最後の2年は基地司令の秘書官に配属。ここでは自衛隊員以外の人との接点が多く、社会人の経験を積むことができました。接遇や交渉の仕方、部隊の運用の仕組みなど、技術以外の知識が身に付きましたし、行政と自衛隊とのつながりを知る良いきっかけにもなりました。
それから大学院に行くのですが、研究室を選ぶのにずいぶん悩みましたね。ロボットにも興味がありましたが、いずれ航空自衛隊に戻ることを考えて、それに関わる専門知識を学びたいと思ったんです。飛行ロボットをつくりたいと思っていましたから、人工衛星を研究している先生が着任されたタイミングで、宇宙工学の研究をさせてもらいました。
宇宙工学から医療ロボットの開発へ
―そこではどんな研究を?
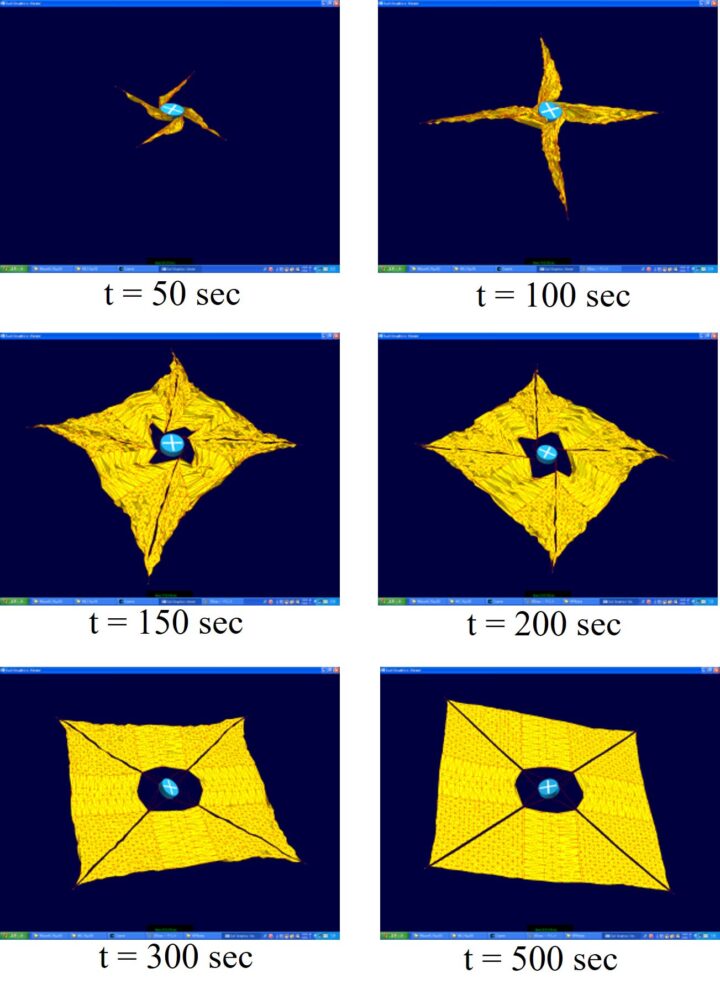
JAXAの「IKAROS(イカロス)」というソーラーセイルを宇宙空間で展開する技術です。
光は波動の特性がありますが、運動量も持っています。だから宇宙空間でヨットのような膜面(セイル)を広げると光の圧力を受けて加速するんです。ちり紙よりも薄い膜面は、地球上だと空気があるので思ったように動かせませんが、重力や大気がない宇宙空間だと推進力を与えると加速できます。その理論を生かした実証実験機が「IKAROS」です。
薄いので小さく収納すれば移送に好都合でしょう? 地球上でコンパクトに畳んで宇宙へ飛ばし、宇宙に着いたら大きく広げます。しかし、ここで失敗は許されません。展開機構が万が一不具合を起こした際に、折り畳まれた膜を一気に開放し、機体の姿勢制御のみによって展開する制御方法を研究するのが私のテーマでした。
私の研究成果が宇宙空間で採用されたかは確認できませんが、IKAROSの打上げによってJAXAは世界初20メートル級の膜面を宇宙空間で展開することに成功し、膜面が太陽光を受けることで機体を加速させたり姿勢を変えたりできることが実証されました。
―それからどのような経緯で、医療の分野に?
宇宙工学は夢が大きく華やかな分野ですが、地上でできることは限られています。いつも大規模なプロジェクトのもとで研究ができるわけではありません。
博士課程に進学し宇宙機の研究をそのまま続ければ論文などの研究実績も積みやすかったのですが、充実した研究生活で厳しい困難も乗り越えたことで何やら自信がついたのか、今度は一から自分の手を動かして実際の現場で動作するロボットをつくってみたいと思いました。
いろいろと思案する中で、私が最も感銘を受けて世の中に貢献したいと思ったのが手術ロボットでした。思い切って研究室を変えて博士課程の3年間でまったく新しい機械を設計し、試作機を医師に評価してもらうという、目指していた通りの研究開発ができました。
―どのようなロボットを開発されたのでしょう?
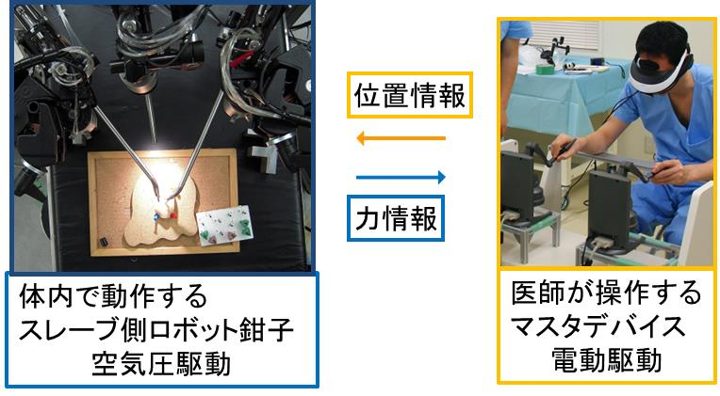
私がテーマに据えていたのは「力の感覚」がある手術ロボットです。アメリカの「da Vinci(ダヴィンチ)」という手術支援ロボットが日本に入ってきて15年ほど経ち、今では大学病院をはじめ大きな医療機関では当たり前のように導入されています。しかし、「da Vinci」を操作している人には「どれくらいの力がかかっているか」という感覚がありません。
私はその「力の感覚」を医師に伝えることを重視しました。しかし患者のお腹の中に入れるデバイスに「力センサー」を内蔵するのは非常に難しいため、ロボットを空気圧駆動にすることで、動作圧力の情報から術具にかかっている力を推定するという研究を行いました。

内視鏡手術の研修会で、ロボットを医師に操作をしてもらって、使いやすさや機能を試してみたのですが、予想以上に課題は山積みでした。たとえば「ここにロボットがあったら、必要な処置ができない」と医師の手技を妨げてしまったり、「このロボットはどこまで滅菌処理されているの?」などと、全く想定していなかった問題が明らかになったり。
手術室では感染症などを防ぐために、手術器具の滅菌処理が必要です。ロボットにはモーターや電子基板があるので、それをまるごと滅菌できるかというと難しい。現場で動かすための研究開発はできても、安全性の担保ができずに実用に至らない。これは医療の現場を知らないがゆえに陥る盲点だと気が付きました。
変わった道のりだからこそ伝えられること
―先生は手術ロボットに関する「起業」にも関わったそうですね。

ええ。手術支援ロボットなどの医療機器研究開発、製造販売を事業とするリバーフィールド株式会社という東工大発のベンチャー企業です。社長として4~5年ほど創業期の事業に専念し、当社の第1号製品である世界初の空気圧駆動による内視鏡ホルダロボットの上市を達成しました。
その後は東工大に戻り特任教員という形で在籍して、次世代技術の研究開発をしていました。現在もリバーフィールドや東工大と共同研究を続けていまして、高専生のものづくり力を生かしたスピード感のある研究成果を上げることが出来ています。
―今後の目標は?
私は自衛官やベンチャー立ち上げといろいろな道を通ってきたので、学術論文の本数などアカデミア職としての経歴は決して多くありません。その分、自衛隊で得た教訓や起業の経験、民間で培った知見を含めて高専生に伝え、教科書には載っていないリアリティのある学びを届けたいと思っています。
研究の面では、引き続き手術支援ロボットの実用を目指して開発を続けたいと思います。ただせっかく高専にいるので、ものづくりが好きな高専生と一緒に宇宙ロボットや自律移動ロボットなど、学生が興味を持ちやすいテーマにも幅広く挑戦していきたいですね。
原口 大輔氏
Daisuke Haraguchi
- 東京工業高等専門学校 機械工学科 准教授

2003年 防衛大学校 理工学部 情報工学科 卒業
2003年- 2013年 防衛省航空自衛隊
2010年 東京工業大学大学院 理工学研究科 機械宇宙システム専攻 修士課程 修了
2013年 東京工業大学大学院 総合理工学研究科 メカノマイクロ工学専攻 博士課程 修了
2013年- 2014年 東京工業大学 精密工学研究所 特任助教
2014年- 2018年 リバーフィールド株式会社
2018年- 2020年 東京工業大学 科学技術創成研究院 特任准教授
2020年- 現職
SHARE
東京工業高等専門学校の記事

アクセス数ランキング


- 都立航空高専から研究者の道へ。電波技術で自動運転や携帯電話のさらなる可能性を追求
- 東京農工大学 工学研究院 先端電気電子部門 教授
有馬 卓司 氏

- “運と縁とタイミング”を学生へつなぐ。高専生の「やりたい」を引き出し、支える教育者へ
- 鶴岡工業高等専門学校 創造工学科 情報コース 講師
倉田 かりん 氏

- 日本のものづくりを“検査”から変える。検査AIで現場のノウハウを残し、世界に誇る品質を未来へ
- 株式会社MENOU 代表取締役CEO
西本 励照 氏

- 高専生が多色ボールペンで特許申請!自ら抱いた疑問を自ら解決する「自主探究」活動とは
- 八戸工業高等専門学校 総合科学教育科 教授
馬渕 雅生 氏
八戸工業高等専門学校 産業システム工学科(電気情報工学コース) 教授
中村 嘉孝 氏
- 野球一筋で甲子園へ! そんな経験から培ったタフさを武器に、知的情報処理研究と学生指導に挑む
- 大分工業高等専門学校 情報工学科 准教授
石川 秀大 氏

- 高専生に必要な国語力とは何か? 独自の取り組みで理工系の女子学生育成&国語力を強化!
- 小山工業高等専門学校 一般科 教授、副校長・総務主事
柴田 美由紀 氏

- 竹から始まる資源循環。離島の高専で挑む弓削島の課題解決と、「離島工学」の拡張性
- 弓削商船高等専門学校 創造工学科 講師
森 耕太郎 氏


-300x300.jpg)