四足歩行ロボットで人の代わりにみかん収穫。移動ロボットの社会実装を目指す!(第2回高専起業家サミット 優秀チーム)
SHARE
- 公開日
- 取材日
国立高専機構と月刊高専が主催で2025年2月に開催した「第2回高専起業家サミット」のソーシャルドクター部門で、一関高専のチーム「innodroid」が優秀賞を受賞しました。
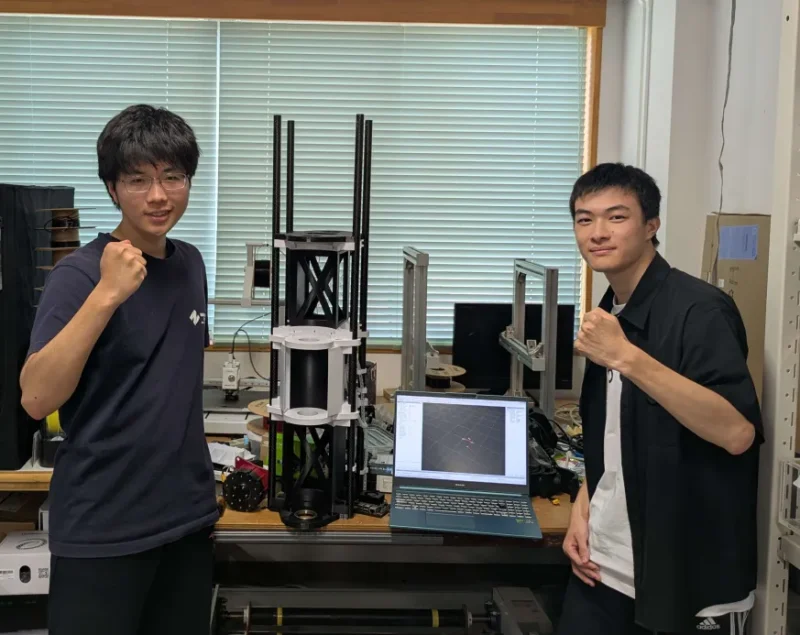
四足歩行の犬型ロボット「CoDog」を活用して人の代わりにみかんを収穫するビジネスプランで注目を集めたinnodroid。チーム名は「イノベーション(innovation)」と「ロボット(droid)」を掛け合わせたものだそうです。そのビジネスプランについて、チームリーダーの三谷竜樹さん(サムネイル写真左)と、ロボット制御やプログラミングなどの面を担当されている上條種稔さん(同右)(ともに未来創造工学科 電気・電子系 5年生)にお話を伺いました。
四足歩行だからこそのメリット
―ビジネスプランの概要について教えてください。
三谷さん:不整地※でも動ける四足歩行の犬型ロボット「CoDog」を開発して、人に代わってみかんを収穫するビジネスプランです。innodroidは「移動ロボットの社会実装」を一番の目標に掲げており、別のビジネスプランと並行してCoDog開発に取り組んでいます。
※芝生や土、砂利道など、平らでないデコボコした地面のこと
―CoDogのビジネスプランを思いついたきっかけは何ですか。
三谷さん:犬型ロボットに対する私の技術的な興味が発端です。数年前に犬型ロボットが話題になったじゃないですか。めちゃくちゃかっこいいなと思いまして、私も挑戦してみたいと思ったんです。最初は一関高専にある3Dプリンタで小さな犬型ロボットをつくったり、ロボットの研究をされている先生に相談して、研究室のスペースを借りて開発したりしていました。
実は、高専起業家サミットにエントリーした段階では、犬型ロボットをつくることしか決まっていませんでした。準備を進める中で、みかんの収穫で役に立ちそうだと分かったんです。
―上條さんもロボットに対して興味を持っていたのでしょうか。
上條さん:ロボットというより、モノづくりにもともと興味を持っていました。innodroidに入ったきっかけは、2年くらい前に三谷が自分でつくった小さな犬型ロボットを見せてくれたことです。すごくかっこいいし、面白そうだと思って、一緒につくることになりました。
三谷さん:現在は研究室のメンバーにも手伝ってもらいながら、CoDogの開発を進めています。
―CoDogの仕様について教えてください。
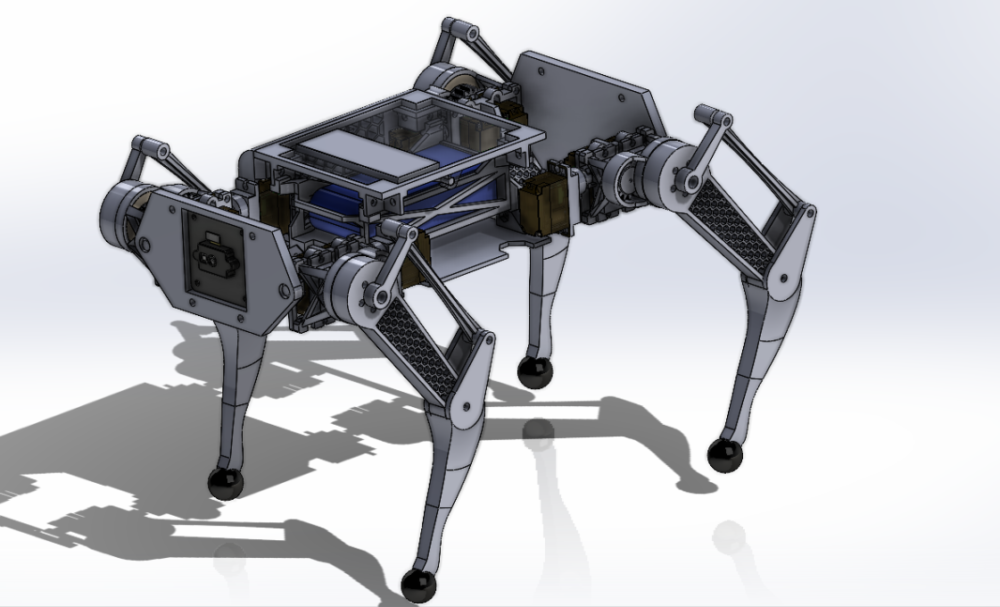
三谷さん:まだ完成していない段階ですが、開発目標としては全長70センチ程の大きさにし、CoDogの背中にロボットアームを載せ、それでみかんを収穫する予定です。また、アームやみかんの重量に耐えられるよう、CoDogそのものは15kg程度の重さにしようと考えています。
みかんの検知はCoDogに搭載したカメラやライダーといったセンサを用いて行います。基本的には自律で動くようにし、収穫作業を行ってほしい範囲を人が指定したら、あとはGPSを利用しながら勝手に巡回して収穫できるようにするのが最終的な目標です。
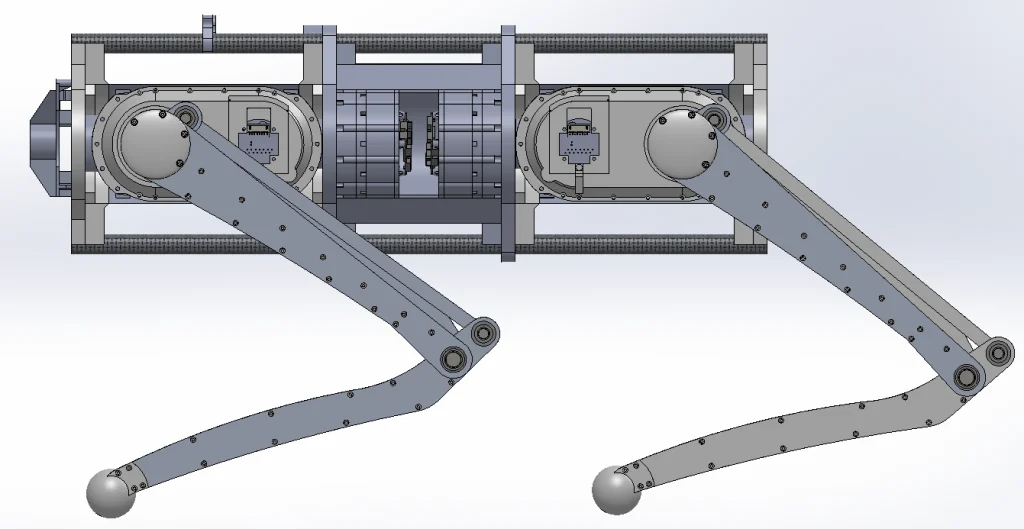
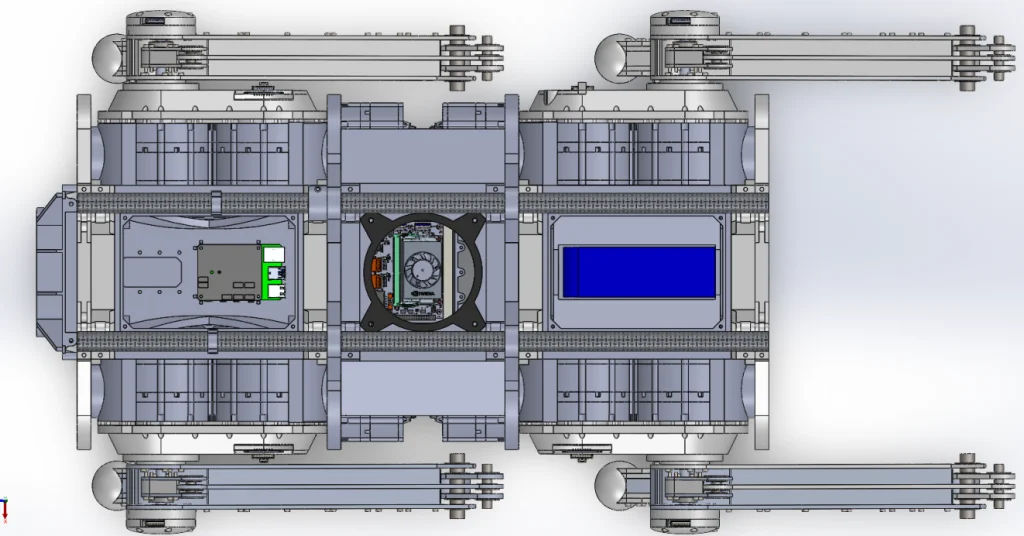
▲開発中のCoDog(大型)を真横から見たデザイン(左)と上から見たデザイン。上から見たデザインの中央にある黒い円のところにロボットアームを取り付ける
―CoDogにはAIも用いられているのでしょうか。
上條さん:はい。CoDogのさまざまな作業でAIを使うことを想定しています。最適な四足歩行をするための強化学習や、みかんの位置の測定、CoDogが通るルートの生成のほか、ロボットアームによる最適な収穫方法の検討などでも使用しようと考えています。
―四足歩行であることのメリットは何だと考えていますか。
三谷さん:一番は走破性でして、みかん畑といった山の傾斜地にあるデコボコした場所でも安定して走行することができます。たくさんのみかんを運ぶだけならキャタピラのロボットでも良いのですが、不整地でモノを運ぶなら、四足歩行が適しているんです。
上條さん:あと、収穫したみかんに傷をつけないためにも、安定性は重要だと考えています。
―第2回高専起業家サミットでは、審査員の方からドローンによる収穫も良いのではないかという指摘がありました。この点に関しては、どう考えていますか。
三谷さん:ペイロード(最大積載量)とロボットサイズとのバランスの面で、四足歩行ロボットの方が良いと考えています。みかん畑は広いのでドローンも有効かもしれないですが、みかんを何キロも積み込んで運ぶドローンをつくろうとすると、結構大きくなってしまうはずです。すると、みかんの木の隙間にドローンが入れないといった課題も発生しそうなので、四足歩行でみかんを収穫する方が適していると考えています。
ヒアリングでみかん栽培の実情を知る
―みかん農家の方へのヒアリングは行いましたか。
三谷さん:はい。ビジネスプランのフィードバックや、さらにどういう機能が欲しいのか/あるいは要らないのか、金額がいくらなら買いたいのかをヒアリングしました。アイデア自体は非常に魅力的だとおっしゃっていただきましたが、「CoDogで全部のみかんを収穫できなくても良い」という農家目線の言葉が印象的でしたね。
つまり、採りやすいところだけをCoDogがどんどん収穫し、高いところや奥まったところといった収穫しにくいところは農家が採るのはどうかというご意見でした。あと、高級品や贈答品だと、やはり人の手で1個1個収穫した方が良いようです。ヒアリングを受けて、私たちは比較的採りやすいところにある安いみかんや加工用のみかんを収穫するCoDogをつくるという開発目標に更新しました。

―将来的にはみかん収穫以外の用途も考えているのですか。
三谷さん:みかん収穫がうまくいけば、同じ柑橘系のレモンや文旦(ザボン)など、その後はりんごや梨といった農作物全般に展開していくことができると考えています。基本的に四足歩行ロボットのベースは変えず、ロボットアームを取りかえるだけで異なる農作物を収穫できるようにしたいですね。これもヒアリングで知ったことなのですが、一つの農地で異なる農作物を育てることは多いそうです。
また、ビルを巡回する管理業務など、四足歩行であるCoDogができることは農業以外でも多いと思います。まずは農業関係で技術の幅を広げつつ、その後の展開を探っていきたいです。
ちなみに、四足歩行ロボットのベースは変えず、ロボットアーム等の取り換えだけでさまざまな分野で展開できることは、販売する側にもメリットがあります。用途別にイチからロボットをつくることには、コスト的にも労力的にもリスクがあるからです。
―販売プランについて教えてください。
三谷さん:まだ考えている途中ではあるのですが、大まかにはロボット自体の販売のほか、農作物に合わせたAIのサブスクリプションなども挙げられると考えています。
自分たちの取り組みを、人に見せるということ
―ビジネスプランを進める中で、楽しかったこと/苦労したことを教えてください。
上條さん:シミュレーション上ではうまくいっても、現実だとさまざまな問題が生まれることに苦労しました。ハードウェアとソフトウェアの境界があることにすごく難しさを感じましたね。開発段階ですと夜遅くまで研究室に残ることがあるので、辛いことも多かったです。
ただ、組み立ての段階に入ってモノができてきたり、実際に動いているところを見たりすると、「今までやってきた甲斐があったな」と、本当に達成感に満ち溢れます。こういう達成感を抱く瞬間は正直なところかなり少ないのですが、数少ない楽しみのために普段から頑張っていますね。
三谷さん:自分が一からやりたいと思って、自分で一から段取りを組んで紆余曲折しながらここまで来たので、苦労も多かったですね。ただ、CoDogが実際に形になってきていたり、ある程度の研究費をいただいたり、高専起業家サミットに出場できたりと、徐々にビジネスプランの姿が見えるようになってきたのは、本当に嬉しいです。
―第2回高専起業家サミットに参加された感想をお聞かせください。
上條さん:ピッチについては、内容が良くても、緊張で喋り方が変になったり、質問に対して自信をもって答えられなかったりすることで、すごく印象が変わってしまうなと思いました。ポスター発表でも、要点がまとめられていなかったり、ポスターのデザインが悪かったりすると、伝わりづらいと感じましたね。
三谷さん:私たちも含めてですが、ビジネスプランのレベルとピッチのレベルには相関がなく、参加者にうまく面白く伝えることにも高い技術力が必要だと思いました。
抑揚をつけた話し方や身振り手振りをするにしても、やりすぎたら鬱陶しく感じますし、なさすぎると興味をひかれなくなってしまいます。また、どうしても専門的な言葉を使ってしまって、分かりづらくなることもあります。うまい高専生のピッチ・ポスター発表から学んで、私たちの発表で生かしたいですね。

上條さん:交流会では、「こんなにもやる気のある高専生がいるんだ」と、かなり驚きました。他高専の先生ともお話しし、その先生の研究内容と絡めたアドバイスをいただけた点も良かったです。
三谷さん:私は交流会で椎茸の収穫ロボットを研究開発されている高専教員の方とお話ししました。「キャタピラのロボットで開発しているが、揺れてしまってうまく椎茸を採れない」という悩みを抱えているとおっしゃっていましたね。「安定して動くロボットが欲しい」というニーズがあることを改めて実感しましたし、それを頭の片隅に置いて今後の開発につなげたいと思います。
―これまでの経験を踏まえて、起業を考えている現役の高専生へアドバイスを送るとしたら、どのようなことを伝えたいですか。
三谷さん:しょうもないことでも、思いついたらとりあえずつくってみた方が良いと思います。それで成果や評価が得られなくても、自分にはまっていると感じたら、さらにしつこく活動を続けることをおススメしたいです。
上條さん:もともと三谷が発端で始まったプロジェクトで、2人目のメンバーとして加わった私が言うのも変ですが、アイデアの実現に向けて一緒に取り組んでくれる人って、なかなか見つけづらいですよね。
でも、形になりつつあるロボットを研究室の前に置いておくなど、継続的な活動を人から見えるようにすることで、誰かが興味を持ってチームに加わってくれると思います。冒頭でお話しした通り、私がチームに加わったきっかけは、三谷がつくった小さな犬型ロボットでしたから。自分から発信して、他者から共感してもらう大事さを伝えたいです。
◇
<お知らせ>
【第3回 高専起業家サミット】(主催:国立高専機構、月刊高専)の開催が決定しました。
現在プレエントリーを受付中です(2025年9月11日(木)まで)。
募集要項などの詳細はHPをご覧ください。
https://startup.gekkan-kosen.com/
SHARE
一関工業高等専門学校の記事


アクセス数ランキング


- エレベータ業界から就活支援業界に転身。技術者・マネジメントから、高専生の未来を支える仕事へ
- メディア総研株式会社 営業部 部長
村山 諭 氏

-300x300.jpg)
- 高専OG初の校長! 15年掛かって戻ることができた、第一線の道でやり遂げたいこと
- 鹿児島工業高等専門学校 校長
上田 悦子 氏


- 母校で社会実装に励む。地域の未来を見据え、本当に必要な支援ができるのは高専だからこそ
- 鳥羽商船高等専門学校 情報機械システム工学科 教授
江崎 修央 氏

- 「学びたい」を原動力に、金融×ITの最前線へ。成長意欲が連鎖するNTTデータフォースでの、高専卒社員2人の姿
- NTTデータフォース株式会社 北海道・東北ビジネス本部 チーフ
小田中 拓馬 氏
NTTデータフォース株式会社 システム開発事業本部 本部長
有田 久幸 氏



-300x300.png)